SLIM「逆さまに墜落」
2024.01.31
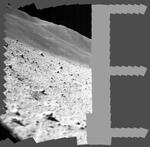
SLIM逆さまに墜落 JAXA小型ロボット「レブ2」が撮影したスリム。姿勢が計画から外れて転倒し、太陽電池を上でなく西(右)に向けて静止している。中央部の横線はノイズ

SLIMは逆さまにしたため軟着陸したが、損傷は軽微だったが太陽電池が発電しなかった 原因は着陸の際、主エンジンの1基が破損停止したため
SLIMエンジン破損とは、日本初の月面着陸に成功した実証機「スリム」が、着陸直前に主エンジンの1基が異常で停止したことを指します1。スリムは自動で姿勢制御を続け、目標地点から約55メートルずれた場所に着陸しました1。このとき、スリムから脱落したエンジンノズルが月面に落ちている様子が航法用カメラに写っていました。スリムはエンジン故障にも堪えて、100メートル級のピンポイント着陸を実現し、計画の主目的を達成しました。
スリムは着陸後、太陽電池が発電しない状態になりましたが、28日に運用が再開され、通信が確立されました。スリムは分光カメラで月面の岩石を撮影し、月の起源の謎に迫る観測を行う予定です1。また、スリムとともに月面に降りた小型ロボット「レブ1」「レブ2」も月面で活動し、レブ2がスリムの撮影に成功しました。
スリムの月面着陸は、日本の宇宙開発の歴史に残る快挙です。スリムのチームには、心から敬意と感謝を表します。
SLIMの主エンジンの1基が破損停止した原因は、現在も調査中です。しかし、SLIMは自律制御で着陸を続け、目標地点から約55メートルずれた場所に逆さまに軟着陸しました。着陸時の速度や姿勢は仕様範囲を超えていましたが、機体の損傷は軽微であると考えられます。
SLIMは着陸後、太陽電池が発電しない状態になりましたが、28日に運用が再開され、通信が確立されました。
SLIMは分光カメラで月面の岩石を撮影し、月の起源の謎に迫る観測を行う予定です。また、SLIMとともに月面に降りた小型ロボット「レブ1」「レブ2」も月面で活動し、レブ2がSLIMの撮影に成功しました。SLIMの月面探査計画は、主目的であるピンポイント着陸の技術実証を達成したほか、科学的データの取得も可能であると見込まれます。
なお、SLIMの月面探査に関する詳細は以下の通りです。
SLIMの月面着陸の結果・成果等について
JAXA、小型月着陸実証機(SLIM)の月面着陸の結果・成果等について発表
実証機スリム活動再開 月が「昼」になり発電可能に 撮影も
小型月着陸実証機「SLIM」
JAXA変形型月面ロボットによる小型月着陸実証機(SLIM)の撮影およびデータ送信に成功
日本の月面探査機「SLIM」、月周回軌道へ投入成功…1月20日に着陸へ
スリム 探査の概要 月探査情報ステーション
小型月着陸実証機SLIM(ISAS)
月面機スリム「ピンポイント着陸」を確認 今後の“復活”へ高まる望み
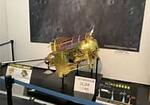
会見でスリムの模型を示しながら説明する坂井氏=25日

日本初の月面着陸に成功した実証機「スリム」について、宇宙航空研究開発機構(JAXA)は25日、当初の目標から約55メートルずれた場所に着陸しており、100メートル級の誤差を目指した世界初の「ピンポイント着陸」を達成していたと発表した。着陸直前に主エンジン1基が異常で停止したものの、機体は自動で姿勢制御を続けた。上空で分離した小型ロボットは、月面でスリムの撮影に成功した。スリムはいったん活動を終えたが、時間が経てば太陽電池に日光が当たり、再起動できる望みがあるという。
「新しい探査へ、扉を開いた」
高度50メートル付近で撮影した月面。中央に、スリムから脱落した円すい形のエンジンノズルが写っている(JAXA提供)

スリムは20日午前零時20分、世界5カ国目となる月面着陸を達成。ただ機体の太陽電池で発電できず、搭載したバッテリーが消耗したため同3時頃にいったん活動を終えた。活動中に地上で受信したデータを分析した結果、当初の目標地点から約55メートル東に着陸したことが判明。従来の月面着陸機で数キロ以上だった目標の誤差を大幅に下回る、100メートル級のピンポイント着陸に成功したことを確認した。
スリムは降下中の高度約50メートルで、月面の岩などの個々の障害物を自動で避けて着陸するよう作動し始めた。この時点での位置誤差は大きく見積もって10メートル、推定3~4メートルほどだったといい、これを実質的な誤差とみることができる。
25日、都内で会見した坂井真一郎プロジェクトマネージャは「信じられないほど、大きな飛躍のように思われる。ただわれわれの見込みでは、正常に着陸すれば10回中、7回くらいは10メートルの精度が出ると見込んでいた。3~4メートルなら(見込みより)少しよかったことになる。10メートルで特に驚くことはない」と説明した。
目標の着陸地点は低緯度の平原「神酒(みき)の海」にある「シオリクレーター」付近の、半径100メートルの円内の傾斜地だった。坂井氏は「安全な場所への着陸が考えられてきた従来なら、考えられないことだ。一方、スリムは100メートルないし10メートルの精度で着陸できた。スポーツ選手が記録を破るとその後、続けざまに(他の選手も)記録が伸びることがあるそうだ。同様にスリムの後、新しい探査をしようと思う人たちが現れるのでは。新しい扉を開いたのかもしれない」と話した。
エンジン故障も、異常対応モードで粘り抜く
高度約50メートルで、2基の主エンジンの1基が推力を喪失したことが分かった。航法用カメラが、スリムから脱落したエンジンノズルが月面に落ちている様子を捉えていた。直前まで正常に作動していたことなどから、スリムチームはエンジン以外の何らかの要因が異常を招いたとみて、解明を目指す。
主エンジン1基だけが作動する状態となったことを、搭載ソフトウェアが検知。すぐに異常対応モードに移行し、機体の位置のずれを抑えるよう姿勢を自動制御しながら降下を続けた。ただ、水平方向の速度や機体の姿勢が計画を外れてしまったため、計画通りに太陽電池のある面を上に向けて静止することはできなかった。
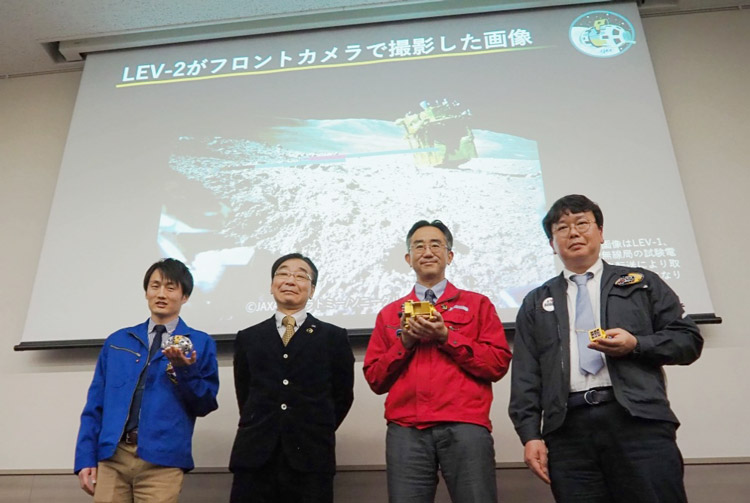
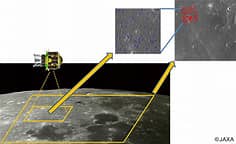
高度約5メートルで2体の小型ロボット「レブ1」「レブ2」を分離し、いずれも月面で活動した。このうち中央大学などが開発したレブ1は飛び跳ねて月面を移動し、地球との通信にも成功。タカラトミーなどのレブ2は計画通りに変形して移動し、さらに月面のスリムを撮影できた。画像には、スリムが転倒して静止している様子が明確に写っている。レブ1とレブ2により、日本初の月面ロボットが実現した。月面を飛び跳ねる移動、地上の指示によらない自律した動作などが、世界初になったという。
レブ2の愛称は「ソラキュー」。JAXAが科学技術振興機構(JST)から「イノベーションハブ構築支援事業(太陽系フロンティア開拓による人類の生存圏・活動領域拡大に向けたオープンイノベーションハブ)」を受託し、小型ロボット技術、制御技術について共同で行う契約をタカラトミーと結んで実現。今回の月面でのスリム撮影に結実している。
スリムが搭載した科学観測用の分光カメラも試験的に動作させ、月面の画像が地上に届いている。
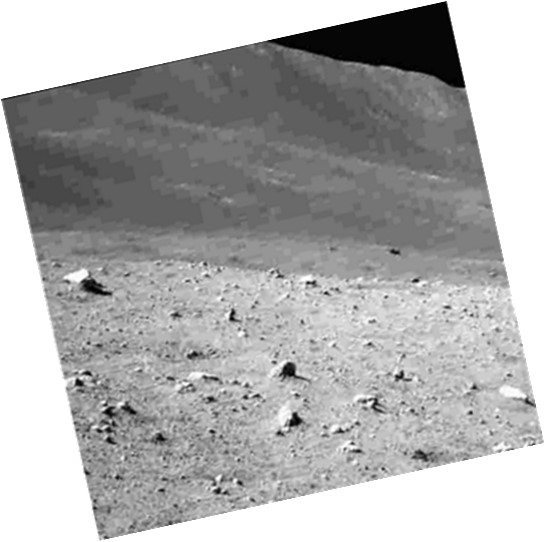
スリムが着陸後、分光カメラで撮影した月面(JAXA提供)
「この成果をカタパルトに、惑星探査拡大へ」
スリムは独自の「2段階着陸」を実施する計画だった。まず1本の「主脚」で月面に接地し、次に残り4本の足も使い、傾斜地に倒れ込んで静止するもの。しかし主エンジンの異常が引き金となって計画通りに着陸しなかったため、結果的にこの着陸方式は実証に至らなかった。
月の昼間は、地球の2週間ほどに相当する長さがあり、着陸地点では来月1日の日没まで続く。スリムの太陽電池は西を向いており、今後“昼過ぎ”となり太陽光が西から当たるようになれば発電し、スリムが再起動できる可能性があるという。ただ、仮に太陽電池が機能しても、他の搭載機器が昼の高温に耐えて生き延びているかは、未知数という。
JAXA宇宙科学研究所の國中均所長は「ピンポイント着陸技術の獲得は大きなステップ。(資源として使える水の氷があるともいわれる)月の極域や、(JAXAの火星衛星探査計画の)MMXでの衛星フォボスへの着陸に応用できる。宇宙研はこの成果をカタパルト(射出装置)にして、惑星探査を拡大させたい」と強調した。
20日の会見で着陸の点数を問われ「ぎりぎり合格の60点」とした國中氏。5日経ち、一連の状況説明に続いて再び同じ質問を受けると「分光カメラとレブ1、レブ2が動いたので、各1点加算して63点」と応じた。相変わらずの辛口評価だが、この日は安堵(あんど)がうかがえる笑顔もみられた。
スリムはエンジントラブルにも堪えてピンポイント着陸を実現し、計画の主目的を達成した。小型ロボットも作動し、既に画期的成果を上げたことは疑いない。今後もし太陽電池が復活すれば、分光カメラを本格作動させ、地下のマントルから月面にむき出しになった「かんらん石」の組成が分析できる。月の起源の謎に迫るという、この観測にまで到達できるだろうか。スリム復活の期待がいよいよ、膨らんできた。
会見後、撮影に応じる國中氏(左から2人目)、坂井氏(3人目)と、小型ロボットの担当者ら=25日

■小型月着陸実証機(SLIM)の月面着陸の結果・成果等について
国立研究開発法人宇宙航空研究開発機構(JAXA)は、2024年1月20日午前0:20(日本標準時)に小型月着陸実証機(SLIM)を月面に着陸させ、地球との通信を確立させました。
しかしながら、SLIMの着陸時の姿勢等が計画通りではなかったことから、太陽電池からの電力発生ができず、同日午前2:57(日本標準時)に地上からのコマンドにより探査機の電源をオフにしました。
電源をオフにするまでに取得した各データの分析を行った結果、SLIMが当初の目標着地地点から東側に55m程度の位置で月面に到達していることが確認できました。また、ピンポイント着陸性能を示す障害物回避マヌーバ開始前(高度50m付近)の位置精度としては、10m程度以下、恐らく3~4m程度と評価しています。詳細データ評価は継続する必要があるものの、SLIMの主ミッションであった100m精度のピンポイント着陸の技術実証は達成できたものと考えられます。
探査機からは、今後のピンポイント着陸技術に必要な着陸に至る航法誘導に関する技術データ、降下中及び月面での航法カメラ画像データを全て取得できました。また、接地直前には小型プローブ(LEV-1・LEV-2)の放出を成功裏に実施しました。加えて、SLIMに搭載されたマルチバンド分光カメラ(MBC)についても、電源オフまでの間に試験的に動作し、撮像画像を取得できました。
他方、太陽電池が電力を発生しない姿勢で月面上に静定した経緯について、取得した技術データを分析したところ、高度50m時点で障害物回避マヌーバを開始する直前、2基搭載されているメインエンジンの1基の推力が失われた可能性が高いことが判明しました。
その状況下でSLIM搭載ソフトウェアは自律的に異常を判断し、徐々に東側に移動するSLIMの水平位置がなるべくずれないように制御しながら、もう1基のエンジンでの降下を継続しました。接地時の降下速度は1.4m/s程度と仕様範囲内より低速でありましたが、横方向の速度や姿勢などの接地条件が仕様範囲を超えていたため、結果として計画と異なる姿勢に落ち着くことになったと考えております。
メインエンジンの機能喪失原因については、メインエンジン自体ではない何らかの外的要因がメインエンジンに波及した可能性が高いと考えています。本事象の原因については現在も調査中であり、詳細判明した時点で、改めてご報告いたします。
今後については、取得できた技術・科学的データの更なる分析や、異常が発生した原因の調査を進めます。
同時に、現在SLIMの太陽電池は西を向いていると分析されることから、今後月面で太陽光が西から当たるようになれば、発電の可能性があると考えています。SLIMの月面上での活動はもともと数日程度以上と想定していましたが、更なる技術・科学データの取得を目指し、引き続き復旧へ向けて必要な準備を行ってまいります。
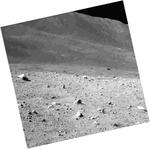
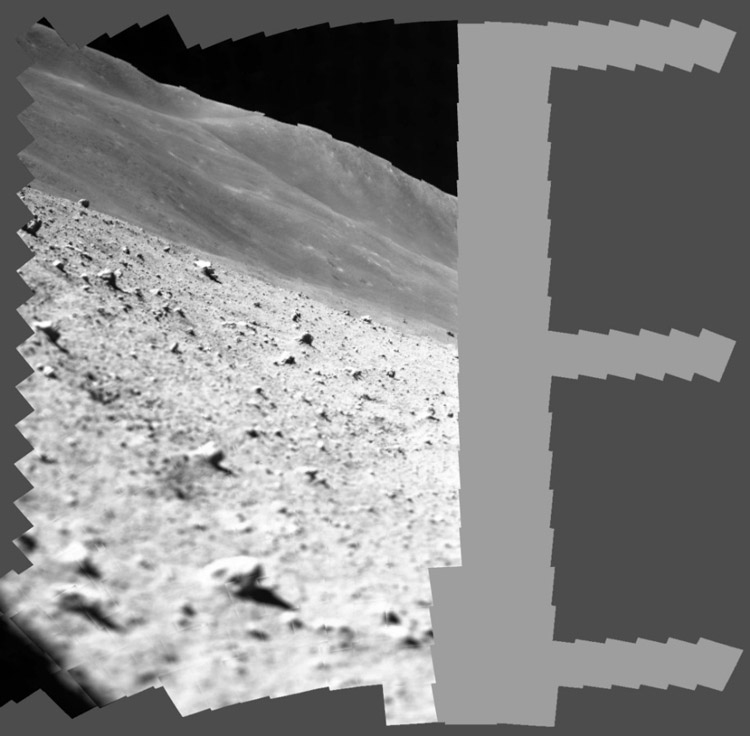
着陸後SLIM搭載航法カメラによる月面画像(クレジット:JAXA)
【注】 重力方向を加味して画像を回転させている
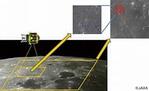
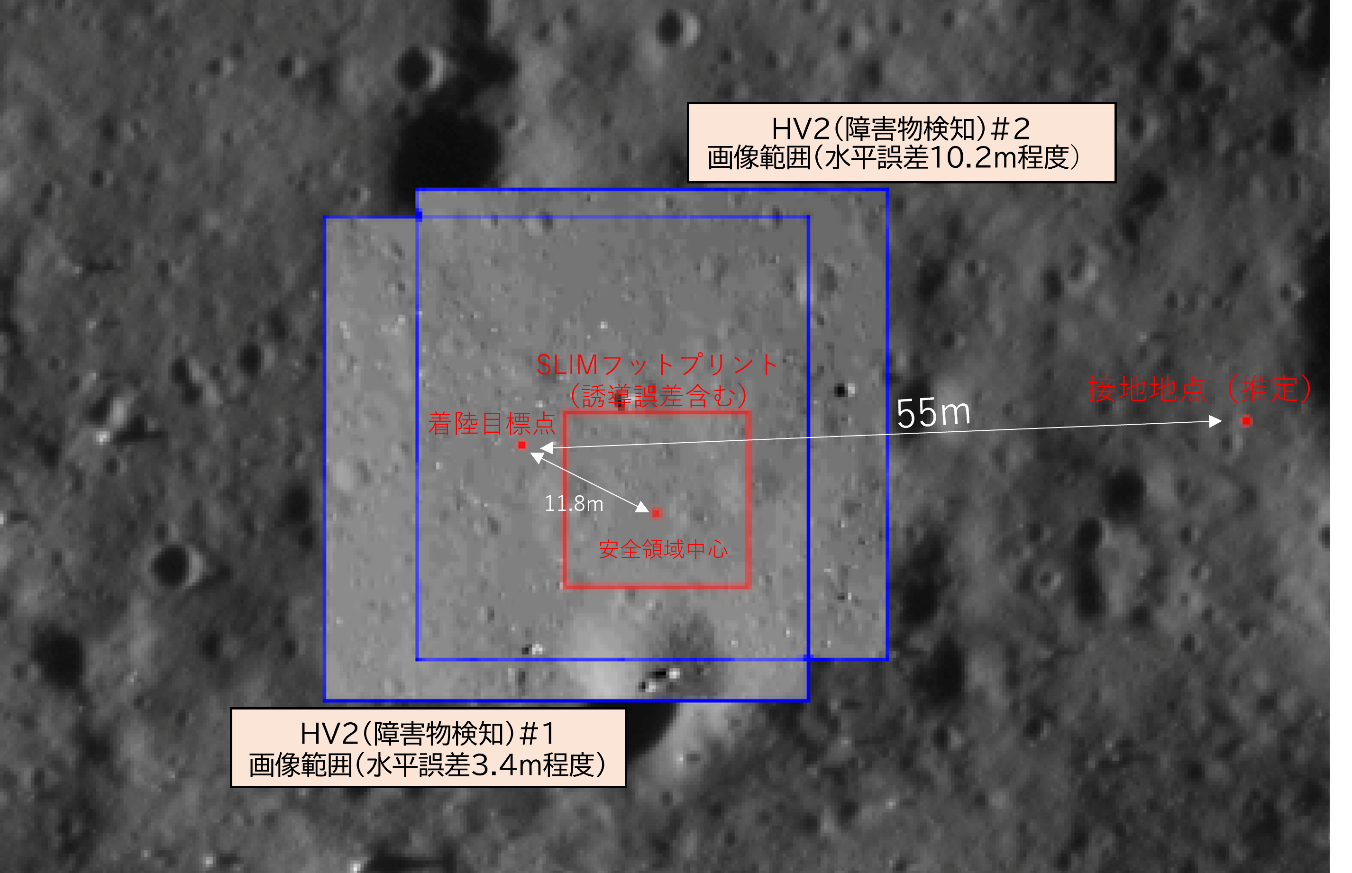
SLIMの着陸目標地点と、現状の位置の推定(クレジット:Chandrayaan-2:ISRO/SLIM:JAXA)
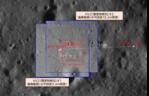
【注】 インド探査機Chandrayaan-2が撮影した月面地形に高度50m地点付近でのHV2(ホバリング2回目)でのSLIM航法カメラによる取得画像などを重ねたもの。2つの青枠がHV2中の障害物検知の際に取得された画像であり、その後は障害物回避動作に入る設計であることから、ピンポイント着陸性能はこの時点での位置精度で評価される。1回目・2回目の障害物検知時点の位置精度はそれぞれ3~4m程度、10m程度であった。なお、2回目の障害物検知時には既にメインエンジン機能喪失の影響を受けていた可能性が高い。赤枠のSLIMフットプリントはHV2の障害物検知機能に基づきSLIMが自律的に設定した着陸安全域。
■SLIM
宇宙航空研究開発機構 (JAXA)が開発中の日本の月着陸機
小型月着陸実証機、SLIMとは、JAXAによる日本の無人月面探査機・着陸機である。月面へのピンポイント着陸を目指すことから複数のメディアで「ムーンスナイパー」とも紹介される。高さ約2.4 m、重さは燃料を除き約200 kg。H-IIAロケット47号機で2023年9月7日午前8時42分11秒に鹿児島県の種子島宇宙センターから打ち上げられ、2024年1月20日に日本初となる月面着陸を達成し、かつ史上初。
宇宙の過酷な環境で使うコンピュータは地上用に比べて約100分の1の低い処理能力しかない。 そこでSLIMでは専用の計算効率の高い画像処理アルゴリズムを開発。 「長年にわたり宇宙科学研究所で研究、大学にも協力してもらい実現した」(坂井プロマネ)。 こうして自分の位置を自分で知ることができる、賢い探査機ができあがった。

SLIMは逆さまにしたため軟着陸したが、損傷は軽微だったが太陽電池が発電しなかった 原因は着陸の際、主エンジンの1基が破損停止したため
SLIMエンジン破損とは、日本初の月面着陸に成功した実証機「スリム」が、着陸直前に主エンジンの1基が異常で停止したことを指します1。スリムは自動で姿勢制御を続け、目標地点から約55メートルずれた場所に着陸しました1。このとき、スリムから脱落したエンジンノズルが月面に落ちている様子が航法用カメラに写っていました。スリムはエンジン故障にも堪えて、100メートル級のピンポイント着陸を実現し、計画の主目的を達成しました。
スリムは着陸後、太陽電池が発電しない状態になりましたが、28日に運用が再開され、通信が確立されました。スリムは分光カメラで月面の岩石を撮影し、月の起源の謎に迫る観測を行う予定です1。また、スリムとともに月面に降りた小型ロボット「レブ1」「レブ2」も月面で活動し、レブ2がスリムの撮影に成功しました。
スリムの月面着陸は、日本の宇宙開発の歴史に残る快挙です。スリムのチームには、心から敬意と感謝を表します。
SLIMの主エンジンの1基が破損停止した原因は、現在も調査中です。しかし、SLIMは自律制御で着陸を続け、目標地点から約55メートルずれた場所に逆さまに軟着陸しました。着陸時の速度や姿勢は仕様範囲を超えていましたが、機体の損傷は軽微であると考えられます。
SLIMは着陸後、太陽電池が発電しない状態になりましたが、28日に運用が再開され、通信が確立されました。
SLIMは分光カメラで月面の岩石を撮影し、月の起源の謎に迫る観測を行う予定です。また、SLIMとともに月面に降りた小型ロボット「レブ1」「レブ2」も月面で活動し、レブ2がSLIMの撮影に成功しました。SLIMの月面探査計画は、主目的であるピンポイント着陸の技術実証を達成したほか、科学的データの取得も可能であると見込まれます。
なお、SLIMの月面探査に関する詳細は以下の通りです。
SLIMの月面着陸の結果・成果等について
JAXA、小型月着陸実証機(SLIM)の月面着陸の結果・成果等について発表
実証機スリム活動再開 月が「昼」になり発電可能に 撮影も
小型月着陸実証機「SLIM」
JAXA変形型月面ロボットによる小型月着陸実証機(SLIM)の撮影およびデータ送信に成功
日本の月面探査機「SLIM」、月周回軌道へ投入成功…1月20日に着陸へ
スリム 探査の概要 月探査情報ステーション
小型月着陸実証機SLIM(ISAS)
月面機スリム「ピンポイント着陸」を確認 今後の“復活”へ高まる望み
会見でスリムの模型を示しながら説明する坂井氏=25日

日本初の月面着陸に成功した実証機「スリム」について、宇宙航空研究開発機構(JAXA)は25日、当初の目標から約55メートルずれた場所に着陸しており、100メートル級の誤差を目指した世界初の「ピンポイント着陸」を達成していたと発表した。着陸直前に主エンジン1基が異常で停止したものの、機体は自動で姿勢制御を続けた。上空で分離した小型ロボットは、月面でスリムの撮影に成功した。スリムはいったん活動を終えたが、時間が経てば太陽電池に日光が当たり、再起動できる望みがあるという。
「新しい探査へ、扉を開いた」
高度50メートル付近で撮影した月面。中央に、スリムから脱落した円すい形のエンジンノズルが写っている(JAXA提供)

スリムは20日午前零時20分、世界5カ国目となる月面着陸を達成。ただ機体の太陽電池で発電できず、搭載したバッテリーが消耗したため同3時頃にいったん活動を終えた。活動中に地上で受信したデータを分析した結果、当初の目標地点から約55メートル東に着陸したことが判明。従来の月面着陸機で数キロ以上だった目標の誤差を大幅に下回る、100メートル級のピンポイント着陸に成功したことを確認した。
スリムは降下中の高度約50メートルで、月面の岩などの個々の障害物を自動で避けて着陸するよう作動し始めた。この時点での位置誤差は大きく見積もって10メートル、推定3~4メートルほどだったといい、これを実質的な誤差とみることができる。
25日、都内で会見した坂井真一郎プロジェクトマネージャは「信じられないほど、大きな飛躍のように思われる。ただわれわれの見込みでは、正常に着陸すれば10回中、7回くらいは10メートルの精度が出ると見込んでいた。3~4メートルなら(見込みより)少しよかったことになる。10メートルで特に驚くことはない」と説明した。
目標の着陸地点は低緯度の平原「神酒(みき)の海」にある「シオリクレーター」付近の、半径100メートルの円内の傾斜地だった。坂井氏は「安全な場所への着陸が考えられてきた従来なら、考えられないことだ。一方、スリムは100メートルないし10メートルの精度で着陸できた。スポーツ選手が記録を破るとその後、続けざまに(他の選手も)記録が伸びることがあるそうだ。同様にスリムの後、新しい探査をしようと思う人たちが現れるのでは。新しい扉を開いたのかもしれない」と話した。
エンジン故障も、異常対応モードで粘り抜く
高度約50メートルで、2基の主エンジンの1基が推力を喪失したことが分かった。航法用カメラが、スリムから脱落したエンジンノズルが月面に落ちている様子を捉えていた。直前まで正常に作動していたことなどから、スリムチームはエンジン以外の何らかの要因が異常を招いたとみて、解明を目指す。
主エンジン1基だけが作動する状態となったことを、搭載ソフトウェアが検知。すぐに異常対応モードに移行し、機体の位置のずれを抑えるよう姿勢を自動制御しながら降下を続けた。ただ、水平方向の速度や機体の姿勢が計画を外れてしまったため、計画通りに太陽電池のある面を上に向けて静止することはできなかった。
高度約5メートルで2体の小型ロボット「レブ1」「レブ2」を分離し、いずれも月面で活動した。このうち中央大学などが開発したレブ1は飛び跳ねて月面を移動し、地球との通信にも成功。タカラトミーなどのレブ2は計画通りに変形して移動し、さらに月面のスリムを撮影できた。画像には、スリムが転倒して静止している様子が明確に写っている。レブ1とレブ2により、日本初の月面ロボットが実現した。月面を飛び跳ねる移動、地上の指示によらない自律した動作などが、世界初になったという。
レブ2の愛称は「ソラキュー」。JAXAが科学技術振興機構(JST)から「イノベーションハブ構築支援事業(太陽系フロンティア開拓による人類の生存圏・活動領域拡大に向けたオープンイノベーションハブ)」を受託し、小型ロボット技術、制御技術について共同で行う契約をタカラトミーと結んで実現。今回の月面でのスリム撮影に結実している。
スリムが搭載した科学観測用の分光カメラも試験的に動作させ、月面の画像が地上に届いている。
スリムが着陸後、分光カメラで撮影した月面(JAXA提供)
「この成果をカタパルトに、惑星探査拡大へ」
スリムは独自の「2段階着陸」を実施する計画だった。まず1本の「主脚」で月面に接地し、次に残り4本の足も使い、傾斜地に倒れ込んで静止するもの。しかし主エンジンの異常が引き金となって計画通りに着陸しなかったため、結果的にこの着陸方式は実証に至らなかった。
月の昼間は、地球の2週間ほどに相当する長さがあり、着陸地点では来月1日の日没まで続く。スリムの太陽電池は西を向いており、今後“昼過ぎ”となり太陽光が西から当たるようになれば発電し、スリムが再起動できる可能性があるという。ただ、仮に太陽電池が機能しても、他の搭載機器が昼の高温に耐えて生き延びているかは、未知数という。
JAXA宇宙科学研究所の國中均所長は「ピンポイント着陸技術の獲得は大きなステップ。(資源として使える水の氷があるともいわれる)月の極域や、(JAXAの火星衛星探査計画の)MMXでの衛星フォボスへの着陸に応用できる。宇宙研はこの成果をカタパルト(射出装置)にして、惑星探査を拡大させたい」と強調した。
20日の会見で着陸の点数を問われ「ぎりぎり合格の60点」とした國中氏。5日経ち、一連の状況説明に続いて再び同じ質問を受けると「分光カメラとレブ1、レブ2が動いたので、各1点加算して63点」と応じた。相変わらずの辛口評価だが、この日は安堵(あんど)がうかがえる笑顔もみられた。
スリムはエンジントラブルにも堪えてピンポイント着陸を実現し、計画の主目的を達成した。小型ロボットも作動し、既に画期的成果を上げたことは疑いない。今後もし太陽電池が復活すれば、分光カメラを本格作動させ、地下のマントルから月面にむき出しになった「かんらん石」の組成が分析できる。月の起源の謎に迫るという、この観測にまで到達できるだろうか。スリム復活の期待がいよいよ、膨らんできた。
会見後、撮影に応じる國中氏(左から2人目)、坂井氏(3人目)と、小型ロボットの担当者ら=25日
■小型月着陸実証機(SLIM)の月面着陸の結果・成果等について
国立研究開発法人宇宙航空研究開発機構(JAXA)は、2024年1月20日午前0:20(日本標準時)に小型月着陸実証機(SLIM)を月面に着陸させ、地球との通信を確立させました。
しかしながら、SLIMの着陸時の姿勢等が計画通りではなかったことから、太陽電池からの電力発生ができず、同日午前2:57(日本標準時)に地上からのコマンドにより探査機の電源をオフにしました。
電源をオフにするまでに取得した各データの分析を行った結果、SLIMが当初の目標着地地点から東側に55m程度の位置で月面に到達していることが確認できました。また、ピンポイント着陸性能を示す障害物回避マヌーバ開始前(高度50m付近)の位置精度としては、10m程度以下、恐らく3~4m程度と評価しています。詳細データ評価は継続する必要があるものの、SLIMの主ミッションであった100m精度のピンポイント着陸の技術実証は達成できたものと考えられます。
探査機からは、今後のピンポイント着陸技術に必要な着陸に至る航法誘導に関する技術データ、降下中及び月面での航法カメラ画像データを全て取得できました。また、接地直前には小型プローブ(LEV-1・LEV-2)の放出を成功裏に実施しました。加えて、SLIMに搭載されたマルチバンド分光カメラ(MBC)についても、電源オフまでの間に試験的に動作し、撮像画像を取得できました。
他方、太陽電池が電力を発生しない姿勢で月面上に静定した経緯について、取得した技術データを分析したところ、高度50m時点で障害物回避マヌーバを開始する直前、2基搭載されているメインエンジンの1基の推力が失われた可能性が高いことが判明しました。
その状況下でSLIM搭載ソフトウェアは自律的に異常を判断し、徐々に東側に移動するSLIMの水平位置がなるべくずれないように制御しながら、もう1基のエンジンでの降下を継続しました。接地時の降下速度は1.4m/s程度と仕様範囲内より低速でありましたが、横方向の速度や姿勢などの接地条件が仕様範囲を超えていたため、結果として計画と異なる姿勢に落ち着くことになったと考えております。
メインエンジンの機能喪失原因については、メインエンジン自体ではない何らかの外的要因がメインエンジンに波及した可能性が高いと考えています。本事象の原因については現在も調査中であり、詳細判明した時点で、改めてご報告いたします。
今後については、取得できた技術・科学的データの更なる分析や、異常が発生した原因の調査を進めます。
同時に、現在SLIMの太陽電池は西を向いていると分析されることから、今後月面で太陽光が西から当たるようになれば、発電の可能性があると考えています。SLIMの月面上での活動はもともと数日程度以上と想定していましたが、更なる技術・科学データの取得を目指し、引き続き復旧へ向けて必要な準備を行ってまいります。
着陸後SLIM搭載航法カメラによる月面画像(クレジット:JAXA)
【注】 重力方向を加味して画像を回転させている
SLIMの着陸目標地点と、現状の位置の推定(クレジット:Chandrayaan-2:ISRO/SLIM:JAXA)
【注】 インド探査機Chandrayaan-2が撮影した月面地形に高度50m地点付近でのHV2(ホバリング2回目)でのSLIM航法カメラによる取得画像などを重ねたもの。2つの青枠がHV2中の障害物検知の際に取得された画像であり、その後は障害物回避動作に入る設計であることから、ピンポイント着陸性能はこの時点での位置精度で評価される。1回目・2回目の障害物検知時点の位置精度はそれぞれ3~4m程度、10m程度であった。なお、2回目の障害物検知時には既にメインエンジン機能喪失の影響を受けていた可能性が高い。赤枠のSLIMフットプリントはHV2の障害物検知機能に基づきSLIMが自律的に設定した着陸安全域。
■SLIM
宇宙航空研究開発機構 (JAXA)が開発中の日本の月着陸機
小型月着陸実証機、SLIMとは、JAXAによる日本の無人月面探査機・着陸機である。月面へのピンポイント着陸を目指すことから複数のメディアで「ムーンスナイパー」とも紹介される。高さ約2.4 m、重さは燃料を除き約200 kg。H-IIAロケット47号機で2023年9月7日午前8時42分11秒に鹿児島県の種子島宇宙センターから打ち上げられ、2024年1月20日に日本初となる月面着陸を達成し、かつ史上初。
宇宙の過酷な環境で使うコンピュータは地上用に比べて約100分の1の低い処理能力しかない。 そこでSLIMでは専用の計算効率の高い画像処理アルゴリズムを開発。 「長年にわたり宇宙科学研究所で研究、大学にも協力してもらい実現した」(坂井プロマネ)。 こうして自分の位置を自分で知ることができる、賢い探査機ができあがった。
 2024.01.31 21:52
|
2024.01.31 21:52
| 

